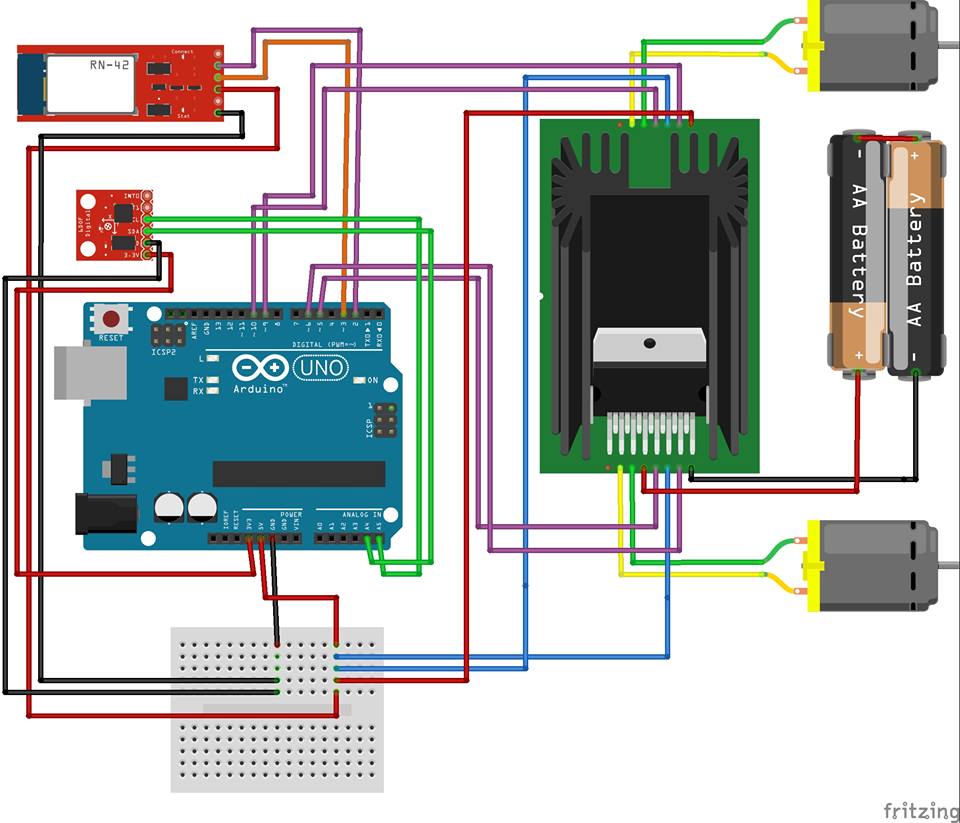
1) dois motores DC funcionando de 3 à 6 volts, que tornam possível a movimentação;
2) São controlados por uma ponte H modelo L298N que efetiva o chaveamento de componentes no método PWM determinando a polaridade e o modo de tensão no circuito;
3) O controle da ponte H é feito com uma placa de microcontrolador Arduino Uno
baseado no Atmega328;
4) A tensão de operação é provida de duas baterias com 4.2V cada;
5) A fim de permitir conexões de alimentação de componentes,
usa-se o Arduino Sensor Shield V4.0;
6) A obtenção de precisão na rotação do carinho foi alcançada através de um giroscópio ITG/MPU 6050;
7) A comunicação remota com o dispositivo móvel é feita a partir de um módulo Bluetooth HC-06 FC114.
Abaixo o esquemático do robô:
Código para comunicação entre robô e aplicativo: https://drive.google.com/file/d/0B73cMUeKCCw4OW9ER2lHaUpQRzQ/view
Bibliotecas adicionais para o incorporar a librares: https://drive.google.com/file/d/0B73cMUeKCCw4U3dtREFGREo2UDA/view
O aplicativo foi desenvolvido com auxílio do AppInventor, ambiente de desenvolvimento orientado a eventos para sistemas móveis do MIT (Massachussets Institute of Tecnology).
Mais informações sobre o AppInventor: http://appinventor.mit.edu/explore/ai2/setup-emulator.html#step2
Projeto para o aplicativo Trilho: https://drive.google.com/file/d/0B73cMUeKCCw4UV9jdDZqTHFLdW8/view
Conto infantil para introduzir o trabalho com robótica com crianças:
Gugu e sua máquina inteligente.
https://drive.google.com/file/d/0B73cMUeKCCw4UjFXWTF0VEFHQU0/view